139-0510-5992(微信号)
177-6896-6998
139-0510-5992(微信号)
177-6896-6998

江苏昱博自动化设备有限公司
业务专线:13905105992(微信号)
业务电话:17768966998
业务联系人:王三祥
邮编:224007
邮箱:yubozdh@163.com
地址:江苏省盐城市经济技术开发区漓江 路42号昱博产业园
网址:www.ycsxgs.com
伺 服 助 力 机 械 手 的 系 统 控 制 原 理

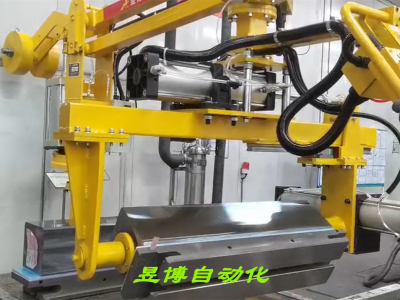
助力机械手是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。在我国经济发展由高速度向高质量转变的过程中,助力机械手的使用已经越来越普及。
我司生产的各型伺服助力机械手系统控制原理:整个系统由高性能单片机、功率放大模块、通讯模块、滤波电路模块等组成。其中高性能单片机主要负责控制算法的计算,功率放大模块实现PWM信号的放大及电机的过流保护,滤波放大电路模块实现对末端操作器和压力传感器信号处理,通讯模块负责与上位机进行通讯。
在控制系统运行的过程中,用单片机内部的定时器产生周期为5ms的时间中断,以便使采样时间任务由就绪状态进入运行状态,在采样时间任务中,通过正交编码计数器,经过辨向,得到电机当前速度和位置,然后通过位置及速度闭环算法得到应该所要求输出的控制量,即PWM占空比,经过功率放大,以驱动电机。在这个过程中驱动模块的电流采样环节对电机的电流进行实时的检测,当电流超过规定值时,电流截止保护电路会产生相应的信号来关闭驱动模块以保护电动机,单片机通过中断对末端操作器的命令进行检测,以实时的响应来自末端操作器的各种命令,并做出应答。