139-0510-5992(微信号)
177-6896-6998
139-0510-5992(微信号)
177-6896-6998

江苏昱博自动化设备有限公司
业务专线:13905105992(微信号)
业务电话:17768966998
业务联系人:王三祥
邮编:224007
邮箱:yubozdh@163.com
地址:江苏省盐城市经济技术开发区漓江 路42号昱博产业园
网址:www.ycsxgs.com

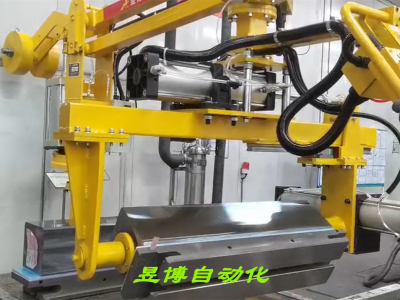
助力机械手,又称为气动助力机械手、气动平衡吊、移载机等,是能自动平衡负载重量的助力装置,被它拿起的负载,无论负载的重量是怎样的变化,它都会快速感知立即响应自动平衡,负载就像失重漂浮在空气中一样,只要在操作手柄上施加单向力,它就会按你的意愿升降平移,垂直轴线上的负载是通过以zhuanli技术为核心的自动平衡器和气缸组成的气控系统实现平衡的;负载的升降是通过气缸驱动实现的。
在助力机械手结构设计中,除考虑强度问题外,还要考虑刚度问题,即助力机械手在抓起重物后,手臂受力会产生变形,要使助力机械手满足位置精度要求,必须控制助力机械手手臂在受力后的变形值,使它在允许范围内。
助力机械手在运动过程中有一个受力最危险、变形最大的状态,是助力机械手搬运重物放到工作台时,重力力臂达到最大值,各臂处于受力最大状态。这时载荷分为3个部分:第一部分是助力机械手除底座外所有零部件的重力,包括大小臂及末端真空吸附装置;第二部分是重物重力施加到各臂和底座上的压力;第三部分是底座自重,约束为一端固定,另一端施加反力及弯矩。
建立好的助力机械手受力模型,对助力机械手的静强度分析采用POST1处理,可清晰地描述结果在整个模型中的变化,并可以快速确定模型中的危险区域。同时,等位移图可以表示出零件各单元的位移变化情况,确定其位移量是否足以影响精度。最大应力值未超过材料的许用应力值,说明设计是合理的,位移量是符合要求的,可以确保运行安全。