139-0510-5992(微信号)
177-6896-6998
139-0510-5992(微信号)
177-6896-6998

江苏昱博自动化设备有限公司
业务专线:13905105992(微信号)
业务电话:17768966998
业务联系人:王三祥
邮编:224007
邮箱:yubozdh@163.com
地址:江苏省盐城市经济技术开发区漓江 路42号昱博产业园
网址:www.ycsxgs.com

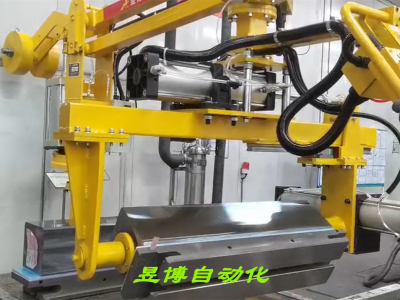
助力机械手又称机械手、平衡吊、手动移载机,是一种新颖的用于物料搬运时省时省力操作的助力设备,它巧妙地应用力的平衡原理,使操作者对重物进行相应的推拉,可在有限的空间内省力地平衡移动定位,重物在提升或下降时形成浮动状态,无需熟练的点动操作。
目前助力机械手的应用已经越来越广泛,整个操作的系统不需要电动进行控制,只需要气动就可以实现操作,这样就使得汽车生产的安全性有了很大的保证。并且助力机械手的使用也大大的减轻了人力的劳动,提高了整个生产线的生产效率。尤其是对于一些人工很难进行操作的工作,比如制动液或者大型蓄电池的搬动,都可以利用助力机械手来进行解决,既减少了对人体皮肤造成伤害的可能,又保证了生产环境的干净整洁。未来助力机械手将会更加的完善,使得汽车生产总装线的效率更加显著的提高,为企业经济的发展带来更大的助力。
在对助力机械手进行设计时,为了保证助力机械手的操作安全,确保助力机械手的高性价比,需对助力机械手的建模和仿真。
在对助力机械手进行建模和仿真过程中,使用软件进行仿真,即实施运动仿真。仿真的虚拟样机在建立起运动机构之前,需要完成静态装备,保证完整的静态约束,从而让虚拟样机上的所有零部件均有着唯一位置。在完成了静态装备后,可建立起运动机构,而运动机构的建立也是运动仿真过程中最为核心的工作,需要在软件的运动机构中,建立起相应的运动副。而运动副可被分为基础以及关联运动副两种类型。两个零部件之间关系相关运动副即为基础运动副。在三维空间中,每一个零部件均有着6个自由度。只有在自由度的数值为0时,才能够让机构进行运动模拟。